Jak działa szyna CAN w samochodzie?
Poranny wypad po bułki. Wsiadasz do samochodu, już w momencie zbliżania się do auta uruchamiane są pierwsze algorytmy, następne po otwarciu drzwi. Uruchomienie silnika odpala kolejne kilka tysięcy linii kodu w różnych sterownikach. Ruszasz z miejsca, kolejne sterowniki zaczynają wykonywać obliczenia. Te wszystkie systemu muszą jakoś z sobą rozmawiać. Na tyle szybko, by zdążyć zapanować nad autem w poślizgu lub przewidzieć zagrożenie. Za tę szybką komunikację między sterownikami odpowiada właśnie sieć CAN.

Aby lepiej zrozumieć sieć CAN należy zacząć od porównania jej do jej starszej siostry, czyli linii komunikacyjnej K-line (oraz dodatkowej L-line). K-line jest pojedynczą linią rozpoczynającą swój bieg od pinu nr 7 w gnieździe diagnostycznym OBD.
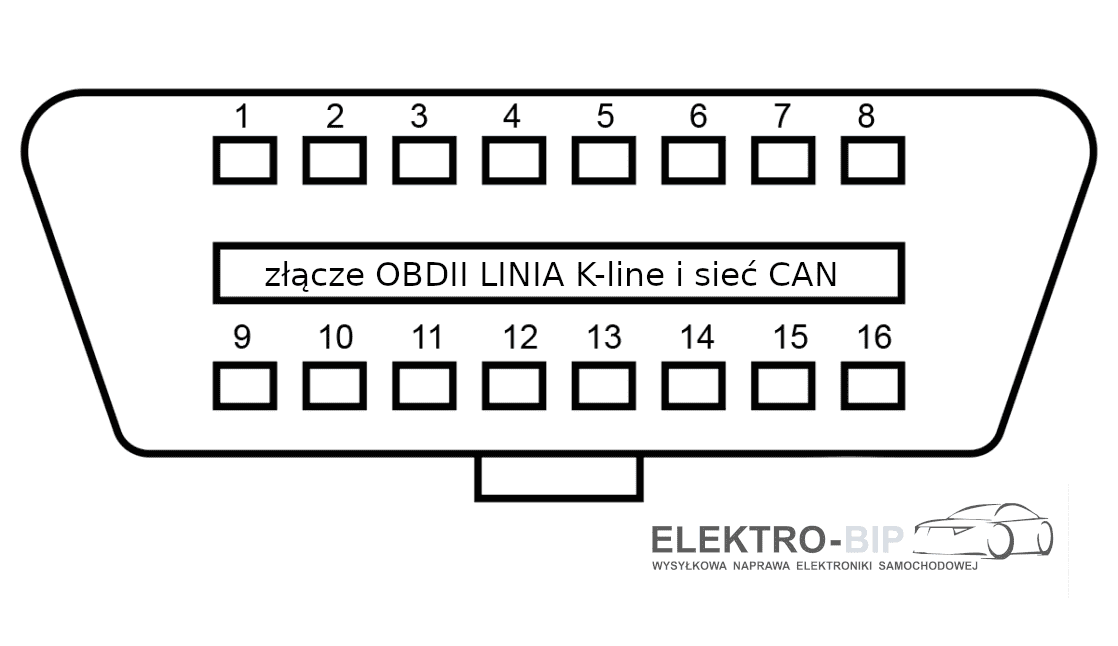
7 - linia K-line
15 - linia L-line
6 - CAN HIGH
16 - CAN LOW
K-Line to jednoprzewodowy system komunikacji szeregowej o bardzo niskiej prędkości, stosowany w wielu pojazdach silnikowych i pojazdach użytkowych. Jest powszechnie używany do połączeń diagnostycznych między elektronicznymi modułami sterującymi (ECM) w pojeździe a sprzętem diagnostycznym (narzędzia skanujące i rejestratory danych). K-Line to sieć oparta na specyfikacji ISO9141, znanej również jako norma 9141 California Air Resources Board (CARB).
K-Line bardzo różni się od sieci CAN Bus i ogólnie od większości sieci komunikacyjnych. Na przykład sieć CAN Bus nie ma ani centralnego, ani głównego modułu ECM: wszystkie moduły ECM są takie same, ponieważ wszystkie są w stanie przesyłać komunikaty w sieci, a także odbierać komunikaty.
W sieci K-Line lub dowolnej sieci zgodnej z normą ISO 9141 niezwykle ważny jest kierunek przepływu wiadomości. Sterowanie siecią jest zdominowane przez nadrzędny ECM, a kierunek i czas komunikatu zależą od tego, który ECM mówi (wysyła komunikat) i które ECM nasłuchują (oczekiwanie na komunikat). Dlatego dwa ECM nie mogą wysyłać wiadomości w tym samym czasie, ale muszą kolejno czekać na zezwolenie nadrzędnego ECM.

Diagram pokazuje, że jest tylko jeden przewód do całej komunikacji w sieci. Dlatego komunikaty muszą być wysyłane w formacie binarnym i przesyłane jako impulsowy sygnał napięciowy. Napięcia na linii K-Line są pulsowane pomiędzy dwiema wartościami w kodzie binarnym (seria jedynek i zer). Kod binarny jest reprezentowany przez napięcia pokazane na rysunku poniżej:

Uwaga: Logika 0 jest reprezentowana przez napięcie baterii, więc może wynosić powyżej 12 V.
Wiadomość K-Line różni się od wiadomości CAN, ponieważ CAN zawsze wysyła całą wiadomość na raz, podczas gdy K-Line może wysyłać wiadomości podzielone na kilka części.
Sieć CAN Bus działa stale jako sieć komunikacyjna i sieć diagnostyczna między ECM podczas pracy pojazdu. Sieć K-Line jest przeznaczona wyłącznie do obsługi sprzętu diagnostycznego. Jednakże, gdy maszyna diagnostyczna nie jest obecna, okablowanie K-Line może być używane przez inne ECM do komunikacji z różnymi szybkościami transmisji i z różnymi wzorcami taktowania.
W komunikacji z użyciem linii K-line pakiet danych wysyłany jest jednym przewodem w postaci zakodowanego sygnału cyfrowego w formie zmian napięcia od 0 do 12V w odniesieniu do uziemienia (masy) pojazdu co wyjaśnione jest na poniższym rysunku. Linia L-line to to samo co K-line powstała by zwiększyć możliwości komunikacji między sterownikami np. o możliwość przesyłania dwóch pakietów danych jednocześnie.

Jak widać na wykresie pakiet danych kodowany jest w formie przebiegu kwadratowego z skokiem napięcia od 0 do 12V. Jest to duży a nawet maksymalny skok napięcia jaki występuje w instalacji samochodowej. Aby nastąpiło poprawne rozkodowanie przebiegu, impulsy muszą być wyraźne a więc dane nie mogą być przesyłane w ten sposób za szybko gdyż grozi to wystąpieniem zakłóceń. Poprawność przesyłania sygnału może być sprawdzona dopiero po przesłaniu całego pakietu i sprawdzeniu sumy kontrolnej.
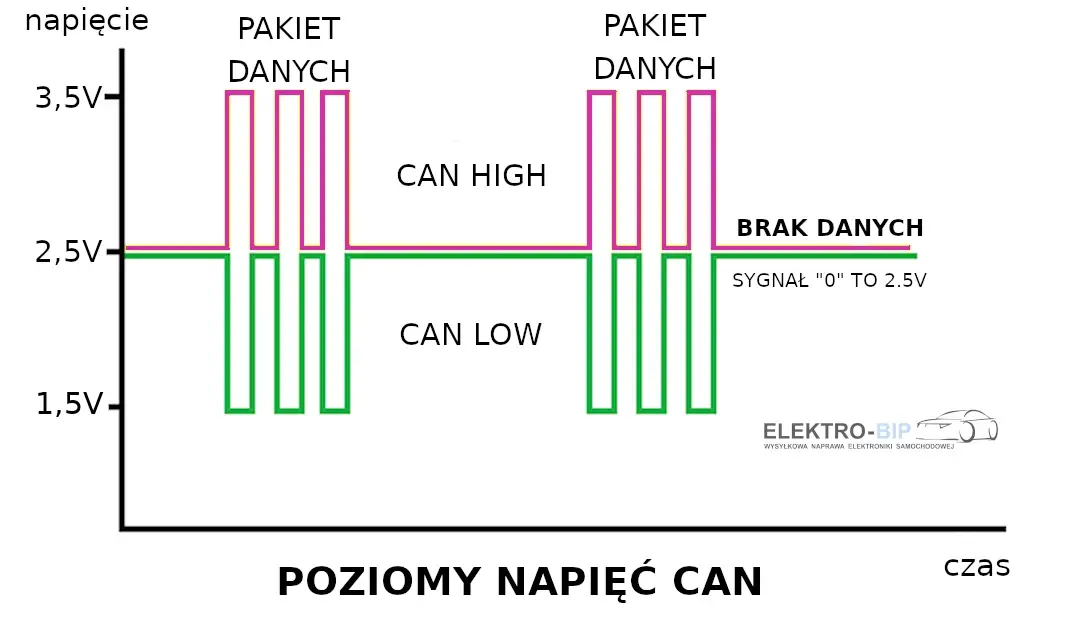
W przypadku sieci CAN poziomy napięć są mniejsze, między 1,5V A 3,5V a skok napięcia dla pojedynczej linii wynosi zaledwie 1V a nie jak w przypadku k-line 12V a tak na prawdę to nawet do 14 volt ponieważ zależy to od napięcia akumulatora. Odwrócenie sygnału w fazie o 180° daje nam lustrzane odbicie wysyłane równocześnie dwiema liniami HIGH i LOW i sprawdzenie poprawności przesłania pakietu odbywa się na bieżąco poprzez kontrolę czy sygnały są przeciwne względem siebie. Poniższy rysunek przedstawia jak wygląda przesyłanie pakietu danych szyną CAN.
Labirynt kabli i komputerów to klucz do najgłębszych tajemnic Twojego pojazdu. Sieć Controller Area Network, czyli CAN, jest niezwykle złożona, ale oto, co kierowcy powinni wiedzieć o tym, jak utrzymać połączenie komponentów swojego samochodu.
Pojazdy coraz częściej zachowują się jak komputery z kołami, więc nadszedł czas na omówienie mało znanego aspektu Twojego samochodu: jego sieci komputerowej. W przeszłości nazwalibyśmy to układem elektrycznym, ale jego misja wyewoluowała daleko poza zwykłą instalację elektryczną samochodu. Ogólnie rzecz biorąc, ta elektronika jest znana jako Controller Area Network lub CAN, ale, konkretnie, system przewodów i protokołów oprogramowania działających jako tkanka łączna między pojazdem”. Komputery i czujniki są znane jako CANbus. CAN pozwala samochodom być mądrzejszymi, tańszymi i zdolnymi do robienia zgrabnych rzeczy, które w innym przypadku nie byłyby możliwe. Uniwersalne protokoły sieci CAN umożliwiają dostawienie do samochodu dodatkowych urządzeń innych niż te montowane fabrycznie wraz z dostępem do niezbędnych parametrów. Informacje przesyłane w sieci samochodowej mogą być wykorzystywane i przetwarzane przez kolejne moduły.
Skoro mowa o porównaniu sieci samochodowej CAN do sieci komputerowej LAN to musi być w samochodzie też coś takiego jak router switch lub hub czyli jakieś skrzyżowanie tych wszystkich danych lub mówiąc inaczej rozgałęźnik albo też główny zarządca. Jedyne co znajdziemy w samochodzie podobnego do sieci komputerowej LAN to bramka i w motoryzacji nazywa się to urządzenie z Angielskiego gateway. Gateway pozwala połączyć się z sterownikami w samochodzie za pomocą komputera diagnostycznego, rozdziela on sygnał CAN i może być to osobny moduł lub role gatewaya może pełnić inny sterownik np. jak ma to miejsce w Oplu gdzie rolę modułu gateway pełni moduł CIM pod kierownicą. Gdy chcemy połączyć się z pojazdem za pomocą testera diagnostycznego to właśnie moduł gateway jest pierwszym komputerem z którym się łączymy lub za pomocą którego łączymy się np. z sterownikiem silnika lub z ABS. W sieci CAN występują też połączenia poza sterownikiem gateway i są to np. połączenie bezpośrednie między komputerem ABS a komputerem od sterowania silnikiem. Często dodatkowa szyna CAN występuje między sterownikiem silnika a sterownikiem skrzyni biegów oraz między sterownikiem silnika a sterownikiem ABS. W takim przypadku sterownik ABS posiada dwa obwody CAN jeden do gateway i ten bezpośredni do sterownika silnika. Tak samo sterownik skrzyni biegów posiada w tym przypadku dwa obwody a z kolei sterownik silnika posiada aż 3 (czasem więcej) obwody CAN jeden ogólny do gateway oraz dwa dodatkowe do sterownika ABS i do sterownika automatycznej skrzyni biegów. Zastosowanie dodatkowych szyn CAN (z poza głównej autostrady) zapewnia szybka bezpośrednią wymianę informacji miedzy sterownikami a taka właśnie jest wymagana przy szybkiej decyzji o zmianie biegów lub zahamowaniu którymś kołem nie można sobie pozwolić na opóźnienia w przesyłaniu danych.
Infrastruktura informacji
W wywiadzie z Ericiem Patonem, specjalista techniczny w Ford, o zawiłościach CAN. Paton mówi: „Jeżeli jest jedna rzecz, którą kierowcy powinni wiedzieć, wsiadając do samochodu, to to, że wszystko wydaje się proste, ale pod osłonami jest niesamowicie złożone”. Konstrukcja CAN jest podobna do systemu autostrady. Dane przemieszczają się jak pojazdy z autostrad o dużym natężeniu ruchu na drogi lokalne za pośrednictwem ramp wjazdowych i poza zjazdowych. Tysiące punktów danych przemierza tę autostradę w dowolnym momencie na dowolnym odcinku i może wysiąść przy dowolnym zjeździe. W całym samochodzie znajdują się różne komputery zwane elektronicznymi jednostkami sterującymi lub ECU – sygnalizacja świetlna i skrzyżowania naszej analogii systemu drogowego. Każdy ECU ma kilka zadań: sterowanie silnikiem lub skrzynią biegów, zwijanie okien, odblokowywanie drzwi i tym podobne. Te komputery mają podłączone czujniki i przełączniki, które wykrywają zmienne, takie jak temperatura, ciśnienie, napięcie, przyspieszenie pod różnymi kątami, hamowanie, zbaczanie i przechylanie pojazdu, kąt skrętu i wiele innych sygnałów. Kiedy ECU potrzebuje sygnału z czujnika podłączonego do ECU w innym miejscu w samochodzie, tam wchodzi CAN.
Podobnie jak autostrada, sieć CANbus pozwala przez cały czas krążyć wokół samochodu dane ze wszystkich czujników i komputerów. Każdy komputer nieprzerwanie przesyła wszystkie informacje z czujników i programowania — w każdej chwili w sieci przepływa aż 2000 sygnałów, niezależnie od tego, czy są żądane, czy nie. W tym samym czasie każdy ECU „nasłuchuje” sieci, aby wyłuskać informacje, których może potrzebować do wykonania swojej pracy. Nie ma centralnego węzła ani systemu routingu, tylko ciągły przepływ informacji, które są zawsze dostępne dla ECU.
Weźmy na przykład elektrycznie przesuwane drzwi, wspólną cechę nowoczesnych minivanów. Drzwi te są obsługiwane przez ECU zwany modułem sterującym nadwozia. Czujniki stale informują, czy drzwi są otwarte, czy zamknięte, a gdy kierowca naciśnie przycisk, aby zamknąć drzwi, sygnał z tego przełącznika jest transmitowany przez sieć. Kiedy jednak ECU odbiera ten sygnał, nie zamyka po prostu drzwi. Najpierw sprawdza strumień danych, aby upewnić się, że samochód jest zaparkowany i nie porusza się. Jeśli wszystko jest w porządku, następnie wydaje polecenie do obwodu zasilania, który zasila silniki używane do zamykania drzwi. Idzie jednak jeszcze dalej – ECU monitoruje następnie napięcie pobierane przez silniki. Jeśli wykryje skok napięcia, co ma miejsce, gdy drzwi są utrudnione przez zbłąkaną torebkę lub niesforną część ciała, ECU natychmiast odwraca kierunek drzwi, aby zapobiec potencjalnym obrażeniom. Jeśli drzwi zamykają się prawidłowo, zatrzask elektrycznie blokuje drzwi. W dawnych czasach byłby to wyczyn inżynierski. Samo elektryczne zasilanie drzwi wymagałoby dedykowanych przewodów biegnących między dźwignią zmiany biegów, przełącznikiem drzwi i silnikiem.
Zanim CAN został opracowany w połowie lat 80., za każdym razem, gdy producent samochodów dodawał funkcję elektroniczną, taką jak, powiedzmy, podgrzewane siedzenia, nowe, dedykowane przewody musiały być dodawane tylko po to, aby podłączyć grzałki do przełącznika zamontowanego na desce rozdzielczej. Z biegiem lat więcej funkcji oznaczało więcej przewodów, aż do momentu, gdy w całym samochodzie pojawiły się dosłownie kilometry przewodów w grubych nadgarstkach winoroślach. Dzięki CAN podgrzewacze siedzeń i przełącznik, który je zasila, nie muszą być bezpośrednio połączone ze sobą. Mogą po prostu „rozmawiać” przez istniejącą sieć CAN — nie są potrzebne żadne specjalne przewody. Co to jest potrzebne jest jednak dodatkowe programowanie, aby połączyć wszystkie urządzenia w sieć. Jest to wybór przejścia w kierunku złożoności programowania zamiast złożoności fizycznej. CAN sprawił, że tworzenie oprogramowania stało się trudniejsze, ale przyniosło o wiele więcej pozytywnych efektów: znaczne oszczędności dla konsumenta, znacznie lżejsza waga, mniejsze uzależnienie od zasobów gumy i miedzi oraz znacznie większa niezawodność przy mniejszej liczbie przewodów do uszkodzenia w miarę upływu czasu. Te atrybuty mogą być ważne z technicznego punktu widzenia, ale najgłębszy efekt tego przesunięcia w kierunku programowania dotyczy diagnostyki pojazdu i aktualizacji oprogramowania.
Lepiej, szybciej i bardziej uniwersalnie...
Kurczenie się wiązki przewodów samochodu i inne korzyści nie były głównym bodźcem do stworzenia CAN. W miarę dojrzewania wymagań dotyczących zanieczyszczeń pod koniec lat 70. Narodowa Administracja Bezpieczeństwa Ruchu Drogowego i Kalifornijska Rada ds. Zasobów Powietrza zażądały sposobów monitorowania skuteczności systemów kontroli emisji pojazdów. Wynikiem tej dyrektywy był ustandaryzowany protokół diagnostyki pokładowej (obecnie drugiej generacji, znany jako OBD-II), który wymagał sieci CAN, aby skutecznie połączyć się ze wszystkimi czujnikami silnika w celu przeprowadzenia autodiagnostyki. Dzięki temu połączeniu wyznaczony ECU może obserwować sieć pod kątem raportów o problemach nadawanych do sieci jako kody OBD-II. Jeśli ECU wykryje problem, wysyła go jako kod alfanumeryczny i zapala się kontrolka Check Engine. Nowoczesne samochody przeprowadzają takie samokontrole za każdym razem, gdy samochód jest uruchomiony. Można podłączyć do standardowego 16-stykowego portu danych w przestrzeni na nogi kierowcy i pobrać kody błędów. Wyszukiwanie w Internecie zwykle wyjaśnia usterkę lub przynajmniej podpowiada problem.
Ten sam port danych przydaje się również, jeśli producent wykryje usterkę komputera lub chce zmodyfikować działanie samochodu. Na przykład producent samochodów może opracować algorytm zapewniający płynniejsze zmiany biegów. Instalacja go w dowolnym samochodzie klienta jest tak prosta, jak podłączenie przez technika dealera komputera do portu danych i wczytanie nowego oprogramowania. Przed CAN oznaczałoby to fizyczną wymianę ECU.
Zaglądanie za cyfrową kurtynę
Firmy tuningowe wiedzą wszystko o możliwości przeprogramowania samochodu. Producenci oczywiście krzywo patrzą na tę praktykę – spowoduje to utratę gwarancji – ale nie każdy może oprzeć się pokusie odtworzenia kodu i wprowadzenia kilku zmian. O ile nie masz dyplomu inżyniera komputerowego, bezpośrednie włamanie się do systemu jest niewskazane (jeśli przypadkowo wypalisz silnik, zostaniesz z ozdobą podjazdu w kształcie samochodu), chociaż niektóre produkty z rynku wtórnego umożliwiają interakcję z siecią Twojego samochodu całkiem satysfakcjonujące, zwłaszcza jeśli jesteś maniakiem prędkości. Mechanicy w hot-rodach, którzy modyfikują silniki na większą moc, od co najmniej dekady z powodzeniem przeprogramowują samochody. Ale pamiętaj, to profesjonaliści.
CO DALEJ: Samochodowe sieci przyszłości

Sieć elektroniczna Twojego samochodu może być zaawansowana, ale wraz ze wzrostem ilości danych, które obsługuje, będzie musiała zostać zaktualizowana. Najprawdopodobniej samochody przyjmą system oparty na sieci Ethernet, taki jak VEEDIMS, ten w high-tech Iconic AC Roadster. VEEDIMS przypisuje każdemu komponentowi pojazdu adres IP, dzięki czemu scentralizowane i zdalne komputery mogą przekazywać ogromne ilości informacji. Podłącz połączenie komórkowe, a dane mogą być przesyłane do chmury w celu analizy. Wizyty u dealerów w celu aktualizacji oprogramowania można zastąpić pobraniem. Co to wszystko powstrzymuje? Wcześniejsze koszty. Odtworzenie oprogramowania zajęłoby miliardy. Ale nadchodzi samochodowy Ethernet — pewnego dnia.